黄現示のスピードの個別設定 [python]
前回ご紹介している信号現示による制御スクリプトでは、列車が駅に停車するときは先の出発信号機が赤現示なので
入線する場内信号機の黄現示で駅に侵入し、出発信号機の赤現示で停止することになります。
場内の区間をセットしているギャップ(これはDCCの特性上、導電性フログのポイントを使用するときにギャップを切る必要があります)から、停止位置までの距離は各駅で同じではありませんので、上手くホームに停止させるのは調整が難しいことが分かりました。
(最悪はオーバーランで、開通していないポイントに逆方向から突っ込むとショートします。)
そこで、まず、基本となる車両を選び、DCCのCV値を決めます。
Decelerationを大きくすると列車はゆっくりと止まります。ここでは31です。
(以前にもご紹介しましたが、KATOから提供されるマニュアルでは最大値31ですが、JMRIではそれ以上の値も設定できます。)
また、黄現示から減速していきますので、スピードテーブルの傾きも影響してきます。
これらをまず固定し、黄現示から駅に侵入させてみますと、どうも感覚的にゆっくりとホームに入ってくる感じです。
ですので、黄現示のときの速度を0.5(最高速度の半分)ではなく、0.7くらいにしてみました。
そうすると、おおむね良いことが分かってきました。しかしこれでは各場内で場内ギャップからホームまでの位置が一定ではないので、調製しきれません。そこで、例によって、各ブロックでの黄現示のときの速度をリストとして与えることにします。
halfList = [0.6, 0.6, 0.6, 0.6, 0.6, 0.71, 0.6, 0.6, 0.6, 0.6, 0.75, 0.6, 0.6, 0.6, 0.6, 0.73, 0.6, 0.6, 0.6, 0.6, 0.6, 0.71, 0.6, 0.6]
こんな感じです。
閉塞信号機や出発信号機のところは、一律0.6で、場内のところだけ、0.71、0.75など微妙に調製できるようにしました。
スピード値の代入のところで、
_________elif self.iro == 'Yellow':
____________self.sp = halfList[i]
とやってやれば、リストの該当する数値を使って減速できるようにしました。
ここまで、1つの代表車両で設定をしておき、あとは各車両間の個体差をDCCのCV値を変えながら調製していきます。
各列車のDecelerationとスピードテーブルをいじります。
Decelerationを大きくすると調整が難しくなりますので、50を超えてくるような場合は
スピードテーブルで最高速度はそのままに、70%くらいのところを上に凸に膨らませてやると、
侵入速度が上がりますので、停止距離が伸びます。
貨物列車では大きなDecelerationにしておくと、実感的になりますね。
このような調子で、全列車のCV値を設定していきました。
あと、1カ所だけ、場内のギャップからホームまで距離が著しく長いところがあります。
ここの調整を何とかしなければなりません。
入線する場内信号機の黄現示で駅に侵入し、出発信号機の赤現示で停止することになります。
場内の区間をセットしているギャップ(これはDCCの特性上、導電性フログのポイントを使用するときにギャップを切る必要があります)から、停止位置までの距離は各駅で同じではありませんので、上手くホームに停止させるのは調整が難しいことが分かりました。
(最悪はオーバーランで、開通していないポイントに逆方向から突っ込むとショートします。)
そこで、まず、基本となる車両を選び、DCCのCV値を決めます。
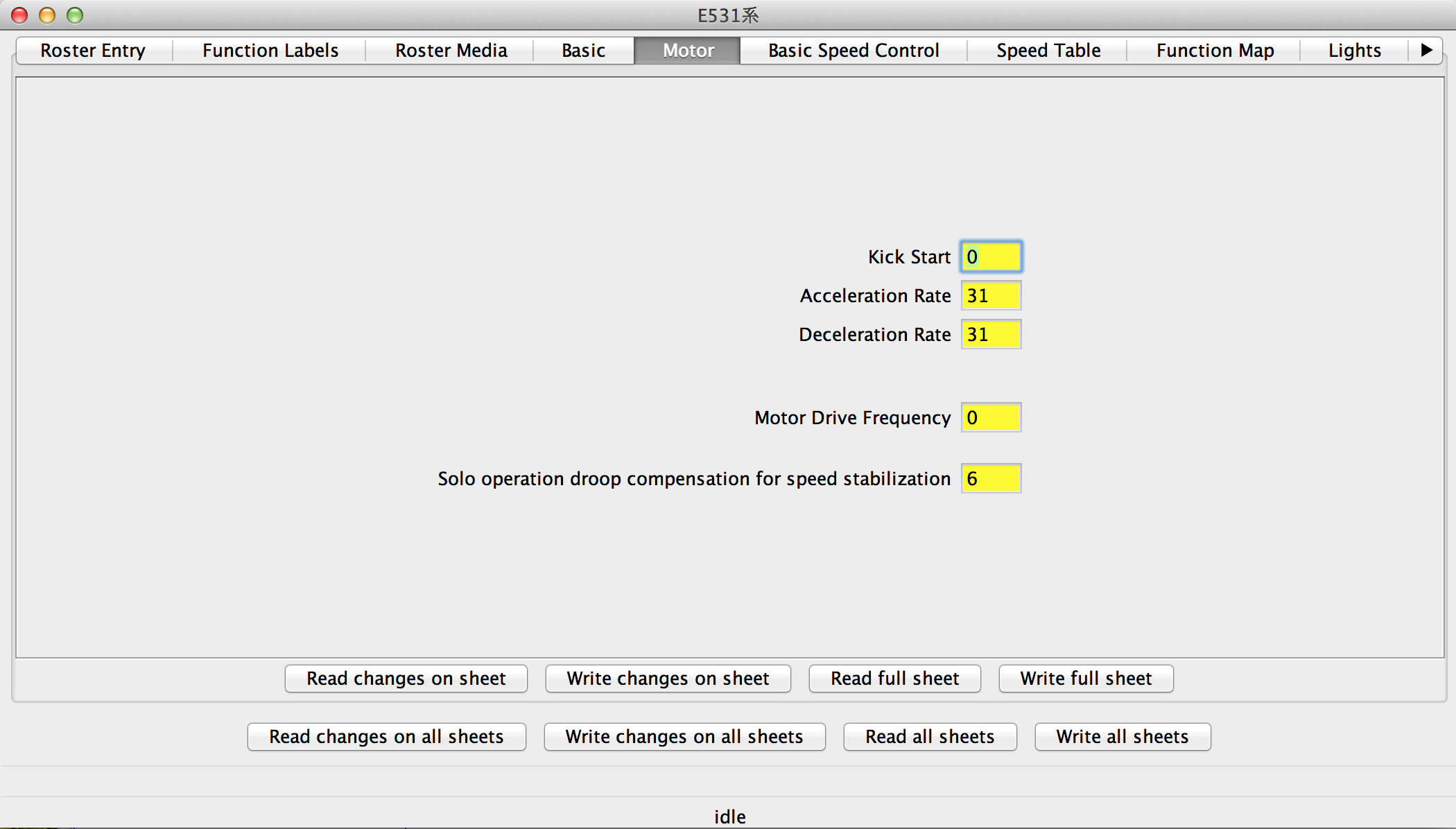
Decelerationを大きくすると列車はゆっくりと止まります。ここでは31です。
(以前にもご紹介しましたが、KATOから提供されるマニュアルでは最大値31ですが、JMRIではそれ以上の値も設定できます。)
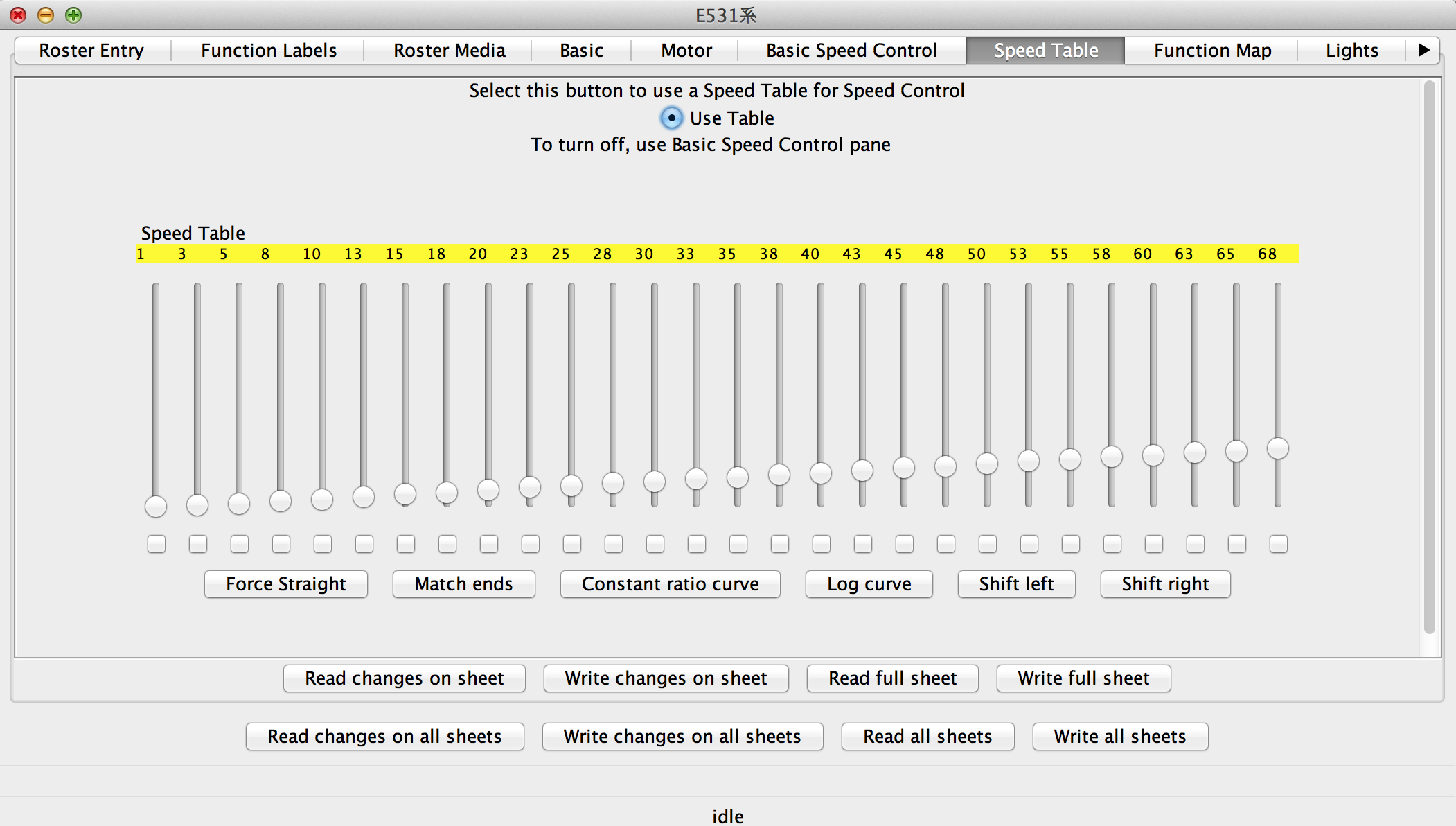
また、黄現示から減速していきますので、スピードテーブルの傾きも影響してきます。
これらをまず固定し、黄現示から駅に侵入させてみますと、どうも感覚的にゆっくりとホームに入ってくる感じです。
ですので、黄現示のときの速度を0.5(最高速度の半分)ではなく、0.7くらいにしてみました。
そうすると、おおむね良いことが分かってきました。しかしこれでは各場内で場内ギャップからホームまでの位置が一定ではないので、調製しきれません。そこで、例によって、各ブロックでの黄現示のときの速度をリストとして与えることにします。
halfList = [0.6, 0.6, 0.6, 0.6, 0.6, 0.71, 0.6, 0.6, 0.6, 0.6, 0.75, 0.6, 0.6, 0.6, 0.6, 0.73, 0.6, 0.6, 0.6, 0.6, 0.6, 0.71, 0.6, 0.6]
こんな感じです。
閉塞信号機や出発信号機のところは、一律0.6で、場内のところだけ、0.71、0.75など微妙に調製できるようにしました。
スピード値の代入のところで、
_________elif self.iro == 'Yellow':
____________self.sp = halfList[i]
とやってやれば、リストの該当する数値を使って減速できるようにしました。
ここまで、1つの代表車両で設定をしておき、あとは各車両間の個体差をDCCのCV値を変えながら調製していきます。
各列車のDecelerationとスピードテーブルをいじります。
Decelerationを大きくすると調整が難しくなりますので、50を超えてくるような場合は
スピードテーブルで最高速度はそのままに、70%くらいのところを上に凸に膨らませてやると、
侵入速度が上がりますので、停止距離が伸びます。
貨物列車では大きなDecelerationにしておくと、実感的になりますね。
このような調子で、全列車のCV値を設定していきました。
あと、1カ所だけ、場内のギャップからホームまで距離が著しく長いところがあります。
ここの調整を何とかしなければなりません。
2013-05-08 01:37
nice!(0)
コメント(0)
トラックバック(0)




コメント 0